 焊接平台焊接平台在生产过程中,会出...
焊接平台焊接平台在生产过程中,会出... 三维柔性焊接平台11三维柔性焊接平台台面采用带...
三维柔性焊接平台11三维柔性焊接平台台面采用带... 调整垫铁调整垫铁产品有二层和三层...
调整垫铁调整垫铁产品有二层和三层... 攻丝机平台平板攻丝机平台平板在使用磨损后...
攻丝机平台平板攻丝机平台平板在使用磨损后...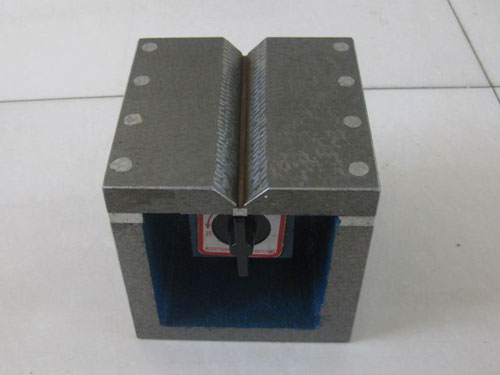 铸铁方箱 铸铁T型槽方箱 铸铁检验方箱 划线方箱我厂生产铸铁方箱、铸铁T型槽...
铸铁方箱 铸铁T型槽方箱 铸铁检验方箱 划线方箱我厂生产铸铁方箱、铸铁T型槽...三维柔性焊接平台柔性工装虽然是一种柔性可重复利用的工装,但其本质决定了需要有足够的结构强度和结构刚度来确定其定位准确度;同时,柔性工装要实现其柔性功能,使得其结构较一般刚性工装复杂。因此,针对柔性工装特点的结构优化设计技术是柔性工装设计的一项重要技术。
三维柔性焊接平台柔性工装的结构优化设计技术主要包括:工装结构(特别是骨架结构)轻量化设计优化以及静刚度变形分析,针对工装应用工况的结构模态分析,柔性工装的柔性功能特性对其结构的影响分析,模块化单元的结构设计等。
对于400mm×400mm以下的小平板,特别是岩石平板。其平板重量较轻,而检定工具(水平仪或反射镜及桥板)重量较重,当其放在不同位置时,平板的三个支点负荷发生不均衡变化,造成平板与支承间产生接触变形。对于检定人员在焊接平台上检定时的移动,应考虑检定场地的稳定性,注意重力变化的影响。检定时除应考虑检定地点稳定外,还应注意检定工具的重量,时应增加辅助支承来增强平板放置的性。检测用的焊接平台在进行鉴定的时候应该保持平台的稳定性,哪怕是很小的震动也会影响测量的结果。焊接平台的本身为测量基面,其放置应稳定,用自准直仪检定时,仪器与平板不在同一刚体上。仪器支架性尤为重要。所以检定规程要求检定场地应稳定,检定地点应避免振动。
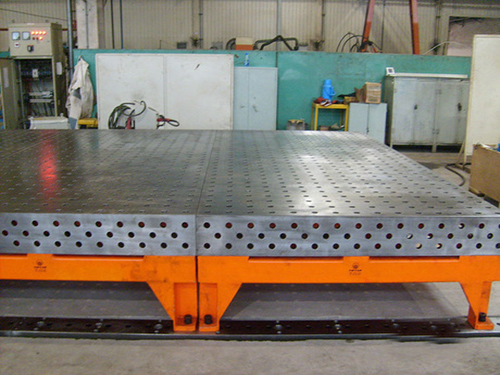
三维柔性焊接平台的承载能力不错,钢性稳定,它的五个面均加工有规则的孔,并刻有网线。三维柔性焊接平台可方便地延伸和扩展,组合。经扩展的标准台面可模块化的定位和夹紧直接连接在一起。在安装、调整和定位工件过程将柔性三维组合焊接工装系统的通用功能展示的酣畅淋漓,在大型工件方面的应用上。拼装方式多样,用户只要充足发挥想象力,几乎可达到任意用夹具同样的定位和夹紧功能。拼装的快,装拆方便;三维柔性焊接平台工作台面可以根据工件形状、大小进行拼装组合。台面上的刻度和模块尺寸的设计,使操作工人不用量具就可以根据工件尺寸搭出所需要的工装。
三维柔性焊接平台的主要特点:
1、三维柔性焊接平台控制系统要具备控制大量执行元件的能力,特别是需要具备准确控制超出(多于6)轴的能力。同时要求工装控制系统具有开放性,伺服轴(电机)数量增减方便,而且数量增减不影响控制精度。
2、三维柔性焊接平台控制系统通过控制伺服电机实现柔性工装中大量定位点的运动控制,柔性工装的功用决定了在应用中一般只关心其各定位点终的位置精度,而不关心运动轨迹精度,因此,柔性工装数控系统一般不需具备多轴同步和插补功能。
3、为适应工装设备一体化的发展趋势,柔性工装控制系统要能适应多种总线拓扑结构,以便能与其他数控设备的数控系统集成。
对于三维柔性焊接平台浇注位置,特别是对于入液位置的选择往往比较随意。因此而造成了一系列的产品质量问题,往往习惯从铁水质量、工艺补缩和操作等方面查找原因,忽略了三维柔性焊接平台的浇注位置。
确定三维柔性焊接平台浇注位置的方法:
1、从三维柔性焊接平台的薄处入金属液,避免薄位浇不足,以及减轻因铸件壁厚差异悬殊而造成的应力。
2、要避免铁水在型砂中推进的较前端部份在产品的关键区域聚集。
3、少用或不用阶梯形浇口。
4、尽量从铸铁工装较低处入金属液,以便铁水平稳上升,浮砂、夹渣充足上浮。
5、尽快充型。
6、变径内浇口、缝隙式浇口、内浇口切向入水等措施对提升浇注质量果的。

